Coord
Construction
Using the default constructor will result in the origin of coordinates. You need to input floating-point numbers when constructing. Also, all geometries only support input of floating-point numbers, which will not be specifically mentioned in the future.
Coord3(Three-Dimensional Coordinate)
Coord3d Coord3
3D coordinate
Definition CoordT.hpp:2810
Coord2(Two-Dimensional Coordinate)
Coord2d Coord2
2D coordinate
Definition CoordT.hpp:2807
Get and Modify
Get
You can use the following two methods to get the value of a particular dimension of the coordinate.
double x = crd.X();
double y = crd.Y();
double z = crd.Z();
double x2 = crd[0];
double y2 = crd[1];
double z2 = crd[2];
Modify
You can modify the value of a particular dimension of the coordinate using the following two methods.
crd.SetXYZ(1.0, 0.0, 2.1);
crd.SetX(0.5);
crd.SetY(0.5);
crd.SetZ(0.5);
Common Function
Operation
Support addition, subtraction, scalar multiplication, dot product, cross product, and also support == and !=.
Addition and Subtraction
Scalar Multiplication
Dot Product
double t = crd1.Dot(crd2);
Cross Product
== and !=
== and != can be used to compare coordinates and their respective dimensions.
double result1 = crd1 == crd2;
std::cout << result1 << std::endl;
double result2 = crd1 != crd2;
std::cout << result2 << std::endl;
double result3 = crd1.Y() == crd2.Y();
std::cout << result3 << std::endl;
Norm
The kernel support calculating the norm (magnitude) of the coordinate and normalizing the coordinate.
Magnitude
double length = crd1.Norm();
Normalization
There are two ways to normalize a coordinate: one does not change the coordinate itself and creates a new coordinate, while the other directly modifies the coordinate.
Output and Input
The kernel support outputting coordinates using << and inputting with >>.
Output
std::cout << crd1 << std::endl;
Input
std::istringstream is("0.0 1.0 2.0");
is >> crd7;
Point
Construction
Using the default constructor will result in the origin. It can either be directly created or constructed based on Coord3/Coord2.
Coord3(Three-Dimensional Point)
PointT< double, 3 > Point3
3D point
Definition PointT.hpp:459
Coord2(Two-Dimensional Point)
PointT< double, 2 > Point2
2D point
Definition PointT.hpp:456
Get and Modify
Get
You can use the following two methods to get the value of a particular dimension of the point.
double x = p1.X();
double y = p1.Y();
double z = p1.Z();
double x2 = p1[0];
double y2 = p2[1];
double z2 = p3[2];
Modify
You can modify the value of a particular dimension of the point using the following two methods.
p1.SetCoord(1.0, 0.0, 2.1);
p1.SetX(0.5);
p1.SetY(0.5);
p1.SetZ(0.5);
Common Function
Operation
The kernel does not support arithmetic operations (addition, subtraction, multiplication, division) on points. In fact, most geometries do not support arithmetic operations, except for Coord. This will not be explained further. However, if you need to perform arithmetic on points, you can first obtain the point's Coord, then perform operations on the Coord:
const Coord3& crd3 = p1.Coord();
const Coord3& crd4 = p2.Coord();
const Coord3& crd5 = crd3 + crd4;
Calculate the Distance Between Two Points
double dis = p1.Distance(p2);
Vector and Direction
Vector3 refers to a mathematical vector with both direction and length, while Direction3 has only direction, with a magnitude of 1.0.
Construction
std::cout << vec << ' ' << dir << std::endl;
std::cout << vec1 << ' ' << dir1 << std::endl;
std::cout << vec2 << ' ' << dir2 << std::endl;
std::cout << vec3 << std::endl;
VectorT< double, 3 > Vector3
3D vector
Definition VectorT.hpp:707
DirectionT< double, 3 > Direction3
3D direction
Definition DirectionT.hpp:566
Get and Modify
The access and modification methods for vectors and directions are similar to the Coord class, except that directions are automatically normalized.
Get
To get a particular dimension's value of a vector or direction:
double x2 = vec[0];
double y2 = vec[1];
double z2 = vec[2];
double x4 = dir[0];
double y4 = dir[1];
double z4 = dir[2];
constexpr const Scalar & Z() const noexcept
Get the z component, only available when DIM >= 3.
Definition DirectionT.hpp:171
constexpr const Scalar & Y() const noexcept
Get the y component, only available when DIM >= 2.
Definition DirectionT.hpp:163
constexpr const Scalar & X() const noexcept
Get the x component, only available when DIM >= 1.
Definition DirectionT.hpp:155
constexpr const Scalar & Y() const noexcept
Get y-coordinate, only available when DIM >= 2.
Definition VectorT.hpp:158
constexpr const Scalar & Z() const noexcept
Get z-coordinate, only available when DIM >= 3.
Definition VectorT.hpp:166
constexpr const Scalar & X() const noexcept
Get x-coordinate, only available when DIM >= 1.
Definition VectorT.hpp:150
Modify
To modify a particular dimension's value of a vector or direction:
void SetX(const OtherScalar &x)
Set x component of the direction, with normalization, only available when DIM >= 1.
Definition DirectionT.hpp:101
void SetY(const OtherScalar &y)
Set y component of the direction, with normalization, only available when DIM >= 2.
Definition DirectionT.hpp:113
void SetZ(const OtherScalar &z)
Set z component of the direction, with normalization, only available when DIM >= 3.
Definition DirectionT.hpp:125
DirectionT & SetCoord(T &&... vs)
Set the coordinate by components, with normalization.
Definition DirectionT.hpp:77
constexpr void SetZ(const OtherScalar &z) &noexcept
Set z-coordinate, only available when DIM >= 3.
Definition VectorT.hpp:117
constexpr void SetY(const OtherScalar &y) &noexcept
Set y-coordinate, only available when DIM >= 2.
Definition VectorT.hpp:108
constexpr void SetCoord(T &&... vs) &noexcept
Set the component values.
Definition VectorT.hpp:81
constexpr void SetX(const OtherScalar &x) &noexcept
Set x-coordinate, only available when DIM >= 1.
Definition VectorT.hpp:99
Common Operation
Operation
Vectors can be added, subtracted, and scaled by a number. Directions do not support addition and subtraction. Both vectors and directions support dot and cross products, similar to the Coord class.
Addition and Subtraction
Scalar Multiplication
Dot Product
double t = vecc.Dot(vec1);
double t2 = dirr.Dot(dir1);
Cross Product
Angle
The kernel supports computing angles. The Angle() method calculates the angle between vectors, with a range of [0.0, pi]. The AngleWithRef() method computes the angle with a reference direction in 2D, with a range of [-pi, pi]. The sign of the angle depends on whether the coordinate system is right-handed or left-handed.
AMCAX::Direction3 ddir(1.0, 0.0, 0.0), other_dir(0.0, 0.5, 0.5), ref_dir(0.0, 0.0, 1.0);
double angle1 = ddir.Angle(other_dir);
double angle2 = ddir.AngleWithRef(other_dir, ref_dir);
Note: In 2D, only Angle() should be used to calculate rotation.
Additionally, the methods IsOpposite() and IsParallel() can be used to check if vectors or directions are opposite or parallel:
bool op1 = v1.IsOpposite(v2, 0.1);
std::cout << op1 << std::endl;
bool pa1 = v1.IsParallel(v3, 0.1);
std::cout << pa1 << std::endl;
bool op2 = d1.IsOpposite(d2,0.1);
std::cout << op2 << std::endl;
bool pa2 = d1.IsParallel(d3, 0.1);
std::cout << pa2 << std::endl;
Class of direction, i.e. the unit vector.
Definition DirectionT.hpp:30
Template class of vector.
Definition VectorT.hpp:30
Magnitude
Vector can compute their magnitude and be normalized, similar to the Coord class.
Magnitude
double length = vec1.Norm();
Normalization
Axis
Axis3 is an axis in 3D space, equivalent to a Point3 plus a Direction3. Construction is as follows:
AxisT< double, 3 > Axis3
3D axis
Definition AxisT.hpp:423
The kernel also supports computing the angle and magnitude of axis:
double angle = axis.Angle(axis2);
Frame
Definition
Frame3 is a frame in 3D space, consisting of a point and three mutually perpendicular directions.
The world coordinate system {O; x, y, z} is a commonly used frame, and the default constructor of Frame3 creates this frame:
constexpr const DirectionT< Scalar, DIM > & XDirection() const noexcept
Get the x direction, only available when DIM >= 1.
Definition FrameT.hpp:451
constexpr const PointT< Scalar, DIM > & Location() const noexcept
Get the location.
Definition FrameT.hpp:435
constexpr const DirectionT< Scalar, DIM > & YDirection() const noexcept
Get the y direction, only available when DIM >= 2.
Definition FrameT.hpp:459
constexpr const DirectionT< Scalar, DIM > & Direction() const noexcept
Get the main direction (z direction) in 3D.
Definition FrameT.hpp:443
FrameT< double, 3 > Frame3
3D frame
Definition FrameT.hpp:887
Note: If the input z-axis is not perpendicular to the x-axis, the algorithm will compute the y-axis as the cross product of z and x, and compute x as the cross product of y and z.
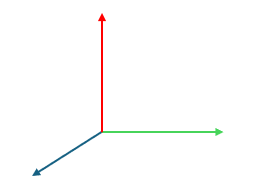
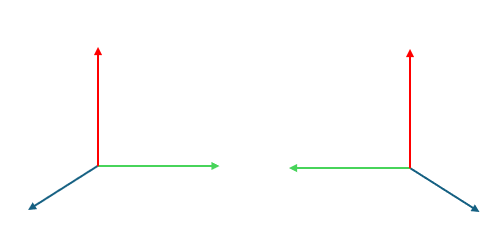
Right-Handed and Left-Handed Systems
The left image shows a right-handed system, and the right image shows a left-handed system (with blue, green, and red representing the x, y, and z axes respectively). The most common local coordinate system is the right-handed system. To determine if a frame is right-handed, curl the fingers of the right hand from x to y, and if the thumb points in the z direction, it is a right-handed system.
The way we kernel to get whether a standard frame is right-handed or not is:
constexpr bool IsDirect() const noexcept
Is the 3D frame right-handed.
Definition FrameT.hpp:522
Local Coordinate System
A frame can represent a local coordinate system, which simplifies the construction of spatial curves and surfaces.
Coordinate Planes
XOY Plane
A standard XOY plane can be constructed in the following two ways.
std::cout << frame1.
Direction() << std::endl;
std::cout << frame1.
Location() << std::endl;
std::cout << frame2.XDirection() << std::endl;
std::cout << frame2.YDirection() << std::endl;
std::cout << frame2.Direction() << std::endl;
std::cout << frame2.Location() << std::endl;
static AMCAX_API const Frame3 & XOY() noexcept
Get a coordinate system where z-direction is the main direction.
YOZ Plane
A standard YOZ plane can be constructed in the following two ways.
std::cout << frame4.
Direction() << std::endl;
std::cout << frame4.
Location() << std::endl;
std::cout << frame5.XDirection() << std::endl;
std::cout << frame5.YDirection() << std::endl;
std::cout << frame5.Direction() << std::endl;
std::cout << frame5.Location() << std::endl;
static AMCAX_API const Frame3 & YOZ() noexcept
Get a coordinate system where x-direction is the main direction.
ZOX Plane
A standard ZOX plane can be constructed in the following two ways.
std::cout << frame7.
Direction() << std::endl;
std::cout << frame7.
Location() << std::endl;
std::cout << frame8.XDirection() << std::endl;
std::cout << frame8.YDirection() << std::endl;
std::cout << frame8.Direction() << std::endl;
std::cout << frame8.Location() << std::endl;
static AMCAX_API const Frame3 & ZOX() noexcept
Get a coordinate system where y-direction is the main direction.
Additionally, in applications, there may be cases involving an XOY plane with a negative Z-axis direction, a YOZ plane with a negative X-axis direction, and a ZOX plane with a negative Y-axis direction.
XOY Plane with Negative Z-axis Direction
std::cout << frame3_2.XDirection() << std::endl;
std::cout << frame3_2.YDirection() << std::endl;
std::cout << frame3_2.Direction() << std::endl;
std::cout << frame3_2.Location() << std::endl;
YOZ Plane with Negative X-axis Direction
std::cout << frame6_2.XDirection() << std::endl;
std::cout << frame6_2.YDirection() << std::endl;
std::cout << frame6_2.Direction() << std::endl;
std::cout << frame6_2.Location() << std::endl;
ZOX Plane with Negative Y-axis Direction
std::cout << frame9_2.XDirection() << std::endl;
std::cout << frame9_2.YDirection() << std::endl;
std::cout << frame9_2.Direction() << std::endl;
std::cout << frame9_2.Location() << std::endl;
Transformation
Most geometries support transformations such as translation, rotation, mirror, and scale.
Translation Transformation
Class of making a box.
Definition MakeBox.hpp:20
Base class of shape, containing an underlying shape with a location and an orientation.
Definition TopoShape.hpp:15
TransformationT< double, 3 > Transformation3
3D transformation
Definition TransformationT.hpp:1115
Rotation Transformation
constexpr double pi
Mathematical constant Pi, ratio of a circle's circumference to its diameter.
Definition Constants.hpp:42
Mirror Transformation
Point Mirror
Axis Mirror
Plane Mirror
Uniform Scale Transformation
Composite Transformation
The formula for composite transformation is sRx+bsRx+b, where ss is the scaling factor, RR is the rotation matrix, xx is the coordinate to be transformed, and bb is the translation vector.
For example, constructing the following transformation: first rotate around the x-axis by π/4π/4, then scale by a factor of 0.2, and finally translate 1 unit along the x-axis:
Class of quaternion.
Definition QuaternionT.hpp:19
Transforming an Object from Local Coordinate System to Global (or Another Coordinate System)
Construct a transformation so that the object in the local coordinate system f2={O=(1,0,0), OZ=(1,1,0), OX=(0,0,1)}is transformed to the global coordinate system:
Transforming Frame 1 by Translating and Rotating to Frame 2
Construct a transformation to change the global coordinate frame to another frame f2={O=(1,0,0), OZ=(1,1,0), OX=(0,0,1)}:
Multiplying Transformations
trans1 * trans2。which applies trans2 first, then trans1: